T>T: Buffon's Needle: Estimating π using Toothpicks
Try the code yourself!
Click the following button to launch an ipython notebook on Google Colab which implements the code developed in this post:
![]()
The Problem
Have you ever wondered if you could calculate \(\pi\) by simply dropping toothpicks on the floor? In the 18th century, French mathematician Georges-Louis Leclerc, Comte de Buffon, wondered exactly that. Not with toothpicks specifically but using needles. However the principle remains the same, and it results in an interesting demonstration of how probability and geometry can intertwine.
Imagine you have a floor made of parallel wooden floorboards, each of equal width. If you drop a toothpick on this floor, what is the probability that the toothpick will cross one of the lines between the floorboards? How can we use this to calculate \(\pi\)?
In this post we are going to answer this question.
The Mathematics
- We have parallel floorboards of width \(d\)
- We drop a toothpick of length \(l\) (where \(l \le d\))
- We want to know the probability, \(P\), that the toothpick crosses a line, the separation between two floorboards
Buffon proved that this probability equals
\[P = \frac{2l}{\pi d}\]Note how \(\pi\) appears in this formula. Rearranging this equation to solve for \(\pi\) gives
\[\pi = \frac{2l}{P d}\]This means we can estimate \(\pi\) by:
- Dropping lots of toothpicks
- Counting how many cross between two floorboards
- Plugging that empirical probability into this formula
The more toothpicks we drop, the closer our estimate should get to the true value of \(\pi\). This is one of the earliest examples of a Monte Carlo method using random sampling to obtain numerical results.
For those that want to see the full derivation, see the section at the end of this post.
Buffon first proposed this problem in 1733, but published the solution in 1777, and I would consider it one of oldest problems in geometric probability, preceding much of the formal development of probability theory.
Simulating the Experiment with Python
Rather than dropping thousands of actual toothpicks (and spending hours cleaning them up), let’s use Python to simulate the experiment.
We are going to create a function in order to run a Buffon needle simulation and we will break down the code section by section. Here is a rough thought process for what we are aiming to do:
Let’s break down how our simulation works:
Setting Up the Experiment: We define the distance between lines and the length of our toothpicks.
- Random Needle Drops: For each toothpick, we randomly determine:
- Its position (x, y coordinates)
- Its angle \(\theta\) relative to the parallel lines
Detecting Crossings: A toothpick crosses a line if its endpoints are on opposite sides of any line.
Calculating \(\pi\): We apply Buffon’s formula to estimate \(\pi\) based on the proportion of toothpicks that cross lines.
- Visualization: We create plots showing both the physical experiment (toothpicks on lines) and how our estimate of \(\pi\) converges as we drop more toothpicks.
1. Imports and Setup
1
2
3
4
5
6
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
from matplotlib.lines import Line2D
import matplotlib.gridspec as gridspec
from typing import List, Tuple, Optional
numpyprovides numerical computation functionsmatplotlib.pyplothandles plotting and visualizationFuncAnimationcreates animations from matplotlib plotsLine2Dis used to create legend elementsgridspecallows for complex subplot grid layoutstypingprovides type hints for better code clarity
2. Needle Simulation Function
1
2
3
4
5
6
def simulate_buffon_needle_batch(
batch_size: int,
needle_length: float = 1,
line_distance: float = 1,
floor_width: float = 10
) -> Tuple[int, List[Tuple[float, float, float]]]:
This function simulates dropping a batch of needles onto the floor and counts how many cross lines.
1
2
3
4
# generate random positions and angles for needles
x_positions = np.random.uniform(0, floor_width, batch_size)
thetas = np.random.uniform(0, np.pi, batch_size)
y_positions = np.random.uniform(0, 10, batch_size)
- creates random x-positions across the floor width
- creates random angles between 0 and \(\pi\) radians
- creates random y-positions for visualization (between 0 and 10)
1
2
3
# for calculation: find distance to nearest line
nearest_line_positions = np.floor(x_positions / line_distance) * line_distance
distances_to_nearest_line = x_positions - nearest_line_positions
- calculates the position of the nearest line to the left of each needle
- calculates how far each needle is from its nearest line
1
2
3
4
5
6
# determine which needles cross a line
needle_half_length = needle_length / 2
crossing_left = distances_to_nearest_line < needle_half_length * np.sin(thetas)
crossing_right = distances_to_nearest_line > line_distance - needle_half_length * np.sin(thetas)
crossings = np.sum(crossing_left | crossing_right)
- a needle crosses a line if its distance to the nearest line is less than \((L/2)\sin\theta\)
- or if its distance to the next line to the right is less than \((L/2)\sin\theta\)
- the total number of crossings is counted
1
2
3
4
# prepare needle data for visualization
needles = [(x_positions[i], y_positions[i], thetas[i]) for i in range(batch_size)]
return crossings, needles
- packages the needle position and angle data for visualization
- returns both the crossing count and needle data
3. Animation Creation Function
1
2
3
4
5
6
7
8
9
10
def create_buffon_animation(
total_needles: int = 1000,
batch_size: int = 10,
needle_length: float = 0.8,
line_distance: float = 1.0,
floor_width: float = 10.0,
fps: int = 30,
duration: int = 20,
output_file: str = 'buffon_needle_animation.mp4'
):
This function creates the animation by dropping needles in batches and updating the visualization.
1
2
3
4
5
6
# helper function to format the error text with color
def error_color_text(error_percent, color):
"""Format the error text with color."""
return f'$\\color{{{color}}}{{{error_percent:.4f}\\%}}$'
- a nested helper function that creates colored text for the error display
- uses LaTeX formatting so the color can be displayed in matplotlib
1
2
# calculate frames needed
frames = min(total_needles // batch_size, fps * duration)
- determines how many animation frames to create
- limits it to either the total number of needle batches or the maximum frames for the duration
1
2
3
# set up the figure with two subplots
fig = plt.figure(figsize=(12, 8))
gs = gridspec.GridSpec(2, 1, height_ratios=[2, 1])
- creates a figure with a 12x8 inch size
- sets up a grid with two rows (top row twice as tall as bottom row)
4. Setting Up the Needle Plot
1
2
3
4
5
6
7
# needle plot
ax1 = plt.subplot(gs[0])
ax1.set_xlim(-0.5, floor_width + 0.5)
ax1.set_ylim(-0.5, 10.5)
ax1.set_xlabel('X position')
ax1.set_ylabel('Y position')
ax1.set_title("Buffon's Needle Experiment")
- creates the top subplot for showing the needles
- sets the axis limits with some padding
- adds labels and a title
1
2
3
4
# draw lines
num_lines = int(floor_width / line_distance) + 1
for i in range(num_lines):
ax1.axvline(x=i*line_distance, color='black', linestyle='-', alpha=0.7)
- calculates how many lines fit on the floor
- draws each line as a vertical line at regular intervals
5. Setting Up the Convergence Plot
1
2
3
4
5
6
7
8
9
10
# convergence plot
ax2 = plt.subplot(gs[1])
ax2.set_xlim(0, total_needles)
ax2.set_ylim(2.5, 3.8) # range around π for visibility
ax2.axhline(y=np.pi, color='r', linestyle='--', alpha=0.7, label=f'π = {np.pi:.6f}')
ax2.set_xlabel('Number of Needles')
ax2.set_ylabel('Estimated π')
ax2.set_title('Convergence to π')
ax2.grid(True, alpha=0.3)
ax2.legend()
- creates the bottom subplot for tracking how π estimate converges
- sets the x-axis to show values up to the total number of needles
- sets the y-axis to focus on values around π
- adds a horizontal line at the true value of π for reference
- adds labels, grid, and legend
1
2
3
4
5
# add second y-axis for error percentage
ax3 = ax2.twinx()
ax3.set_ylabel('Error (%)', color='green')
ax3.set_ylim(0, 25) # error percentage range
ax3.tick_params(axis='y', labelcolor='green')
- creates a secondary y-axis on the right side of the convergence plot
- sets it up to show the error percentage in green
- limits the range to 0-25%
6. Initializing Plot Elements
1
2
3
4
5
6
7
8
9
# initialize plots
needle_lines = [] # will hold all needle lines
# convergence lines
pi_line, = ax2.plot([], [], 'b-', alpha=0.7, label='Estimated π')
error_line, = ax3.plot([], [], 'g-', alpha=0.5, label='Error %')
pi_estimates = []
error_values = []
x_data = []
- creates an empty list to track all needle lines
- creates empty line plots for the π estimates and error values
- creates empty lists to store the data for these plots
1
2
3
4
5
6
7
# add legend to needle plot
legend_elements = [
Line2D([0], [0], color='blue', lw=1.5, alpha=0.5, label='Non-crossing needles'),
Line2D([0], [0], color='red', lw=1.5, alpha=0.7, label='Crossing needles'),
Line2D([0], [0], color='black', lw=1.5, alpha=0.7, label='Lines')
]
ax1.legend(handles=legend_elements, loc='upper right')
- creates legend elements for the needle plot
- shows which color represents crossing vs. non-crossing needles
1
2
3
4
5
6
7
8
9
10
# text for statistics
stats_text = ax1.text(0.02, 0.95, '', transform=ax1.transAxes,
verticalalignment='top', fontsize=10,
bbox=dict(boxstyle='round', facecolor='wheat', alpha=0.5))
# create a prominent display for π estimate and error
pi_display = fig.text(0.5, 0.47, '', fontsize=24, ha='center', va='center',
bbox=dict(boxstyle='round', facecolor='lightblue',
edgecolor='blue', alpha=0.7, pad=0.7, linewidth=2),
transform=fig.transFigure, zorder=1000)
- creates a text box in the upper left of the needle plot for statistics
- creates a prominent text display in the center of the figure for the π estimate and error
1
2
3
4
# animation variables
total_crossings = 0
total_dropped = 0
needles_data = []
- initializes counters for total crossings and needles dropped
- creates an empty list to store all needle data
7. Animation Initialization Function
1
2
3
4
5
6
7
# animation initialization function
def init():
pi_line.set_data([], [])
error_line.set_data([], [])
stats_text.set_text('')
pi_display.set_text('')
return [pi_line, error_line, stats_text, pi_display]
- sets up the initial state of the animation
- clears all lines and text
- returns the list of artists that will be animated
8. Animation Update Function
1
2
3
# animation update function
def update(frame):
nonlocal total_crossings, total_dropped, needles_data
- this function is called for each frame of the animation
- uses nonlocal to access variables from the outer function scope
1
2
3
4
5
6
7
8
9
# drop a new batch of needles
crossings, new_needles = simulate_buffon_needle_batch(
batch_size, needle_length, line_distance, floor_width
)
# update totals
total_crossings += crossings
total_dropped += batch_size
needles_data.extend(new_needles)
- simulates dropping a new batch of needles
- updates the running totals of crossings and needles
- adds the new needle data to the list
1
2
3
4
5
6
7
8
# calculate current π estimate
if total_crossings > 0:
current_pi = (2 * needle_length * total_dropped) / (total_crossings * line_distance)
else:
current_pi = float('inf')
# calculate error
error_percent = abs(current_pi - np.pi) / np.pi * 100
- calculates the current estimate of π using Buffon’s formula
- calculates the percentage error compared to the true value
1
2
3
4
5
6
# update convergence plot
x_data.append(total_dropped)
pi_estimates.append(current_pi)
error_values.append(error_percent)
pi_line.set_data(x_data, pi_estimates)
error_line.set_data(x_data, error_values)
- adds the new data points to the lists
- updates the line plots with the current data
1
2
3
4
# clear previous needles and plot new ones
for needle_line in needle_lines:
needle_line.remove()
needle_lines.clear()
- removes all previously drawn needles
- clears the list of needle lines
1
2
3
4
5
6
# half-length of the needle
half_length = needle_length / 2
# draw all needles up to now (up to a maximum to prevent slowdown)
max_display_needles = min(len(needles_data), 1000) # limit to prevent slowdown
display_needles = needles_data[-max_display_needles:]
- calculates the half-length of the needles
- limits the number of displayed needles to prevent slowdown
- selects the most recent needles to display
1
2
3
4
5
6
7
8
9
crossing_count = 0
for x, y, theta in display_needles:
# calculate needle endpoints
dx = half_length * np.sin(theta)
dy = half_length * np.cos(theta)
x1, y1 = x - dx, y - dy
x2, y2 = x + dx, y + dy
- resets the crossing counter
- calculates the endpoints of each needle based on its center position and angle
1
2
3
4
5
6
7
8
# check if needle crosses a line
crosses = False
line_positions = [i*line_distance for i in range(num_lines)]
for line_pos in line_positions:
if (x1 - line_pos) * (x2 - line_pos) <= 0:
crosses = True
crossing_count += 1
break
- checks if each needle crosses any of the lines
- a needle crosses a line if its endpoints are on opposite sides of the line
- counts how many needles are crossing
1
2
3
4
5
6
7
# plot needle
if crosses:
needle_line = ax1.plot([x1, x2], [y1, y2], 'r-', alpha=0.7, linewidth=1.5)[0]
else:
needle_line = ax1.plot([x1, x2], [y1, y2], 'b-', alpha=0.5, linewidth=1)[0]
needle_lines.append(needle_line)
- draws each needle as a line between its endpoints
- colors crossing needles red and non-crossing needles blue
- adds each line to the list for later removal
1
2
3
4
5
# update statistics text
stats_text.set_text(
f'Needles: {total_dropped}\n'
f'Crossings: {total_crossings} ({total_crossings/total_dropped*100:.1f}%)'
)
- updates the statistics text box with current needle and crossing counts
1
2
3
4
5
6
7
8
9
10
11
12
13
# update the prominent π display
# color the error based on its magnitude (red for high error, green for low)
if error_percent < 1.0:
error_color = 'green'
elif error_percent < 5.0:
error_color = 'orange'
else:
error_color = 'red'
pi_display.set_text(
f'π ≈ {current_pi:.6f}\n'
f'Error: {error_color_text(error_percent, error_color)}'
)
- chooses a color for the error text based on its magnitude
- updates the prominent π display with the current estimate and error
1
return [pi_line, error_line, stats_text, pi_display] + needle_lines
- returns all the artists that need to be redrawn in the next frame
9. Creating and Saving the Animation
1
2
3
4
# create animation
animation = FuncAnimation(
fig, update, frames=frames, init_func=init, blit=True, interval=1000/fps
)
- creates the animation by repeatedly calling the update function
- blit=True makes the animation more efficient by only redrawing changed parts
- interval controls the time between frames in milliseconds
1
2
3
4
5
6
7
# save animation
animation.save(output_file, writer='ffmpeg', fps=fps, dpi=200)
plt.close(fig)
print(f"Animation saved to {output_file}")
return animation
- saves the animation to a file using ffmpeg
- closes the figure to free up memory
- prints a confirmation message
- returns the animation object
10. Main Code Execution
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
if __name__ == "__main__":
np.random.seed(42) # for reproducibility
# create the animation
animation = create_buffon_animation(
total_needles=10000,
batch_size=20,
needle_length=0.8,
line_distance=1.0,
fps=30,
duration=20,
output_file='buffon_needle_animation.mp4'
)
print("Animation complete!")
- sets a random seed for reproducible results
- calls the animation function with specific parameters
- prints a completion message when done
Key Concepts in the Implementation
Let’s break down the important concepts in our code:
Random Needle Generation: Each needle is defined by its center position \((x, y)\) and angle \(\theta\).
Crossing Detection: A needle crosses a line if the distance from its center to the nearest line is less than
\[(L/2)\sin\theta\]in either direction.
Pi Calculation: We use the formula
\[\pi = \frac{2L}{P·d}\]where P is the empirical probability of crossing (crossings/total needles).
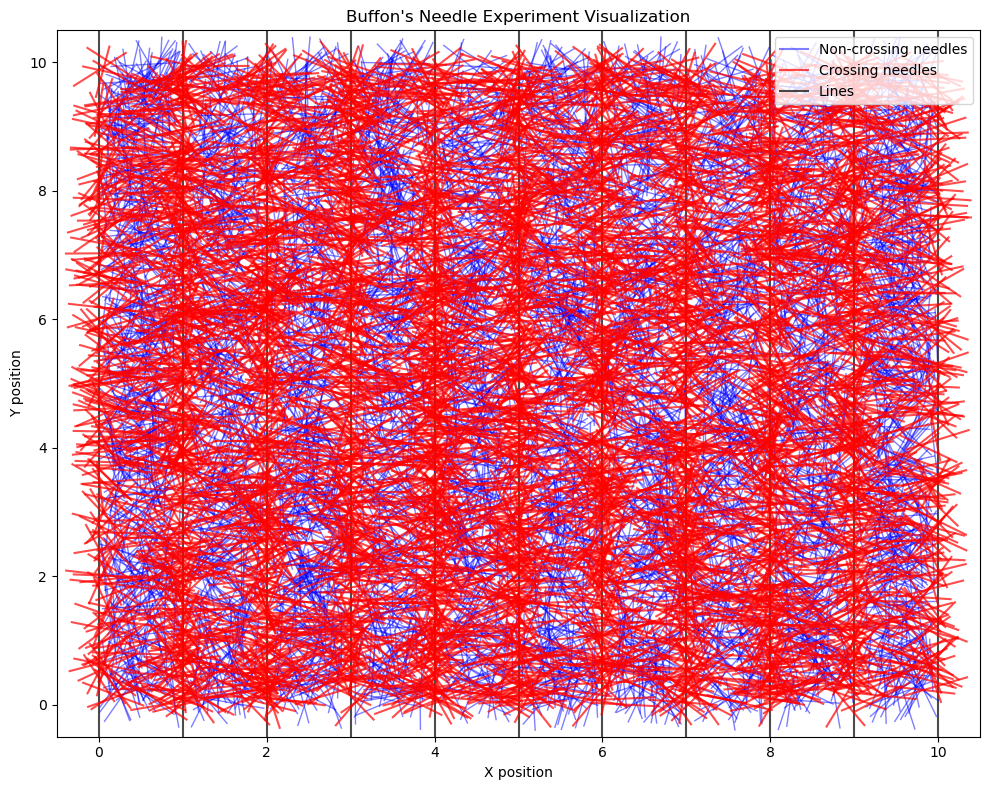
Visualization: We highlight crossing needles in red and non-crossing needles in blue.
Convergence Analysis: We track how our estimate approaches \(\pi\) as we increase the number of needles, showing that Monte Carlo methods require large sample sizes for accuracy.
Full Code
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.lines import Line2D
from tqdm import tqdm
from typing import Tuple, List, Optional, Dict, Any, Union, Callable
def simulate_buffon_needle(
num_needles: int,
needle_length: float = 1,
line_distance: float = 1,
floor_width: float = 10
) -> Tuple[float, int, List[Tuple[float, float, float]]]:
"""
Simulate Buffon's needle experiment.
Parameters:
-----------
num_needles : int
Number of needles to drop
needle_length : float
Length of each needle (should be <= line_distance)
line_distance : float
Distance between parallel lines
floor_width : float
Total width of the floor for visualization
Returns:
--------
Tuple[float, int, List[Tuple[float, float, float]]]
(estimated_pi, crossings, needles)
where needles is a list of (x, y, theta) for each needle
"""
# validate needle length
if needle_length > line_distance:
raise ValueError("Needle length must be less than or equal to line distance")
# random positions and angles for needles
# for visualization: x positions across the entire floor
x_positions = np.random.uniform(0, floor_width, num_needles)
thetas = np.random.uniform(0, np.pi, num_needles)
# calculate y positions (0-10 for visualization)
y_positions = np.random.uniform(0, 10, num_needles)
# for calculation: find distance to nearest line for each needle
# lines are at positions 0, line_distance, 2*line_distance, etc.
nearest_line_positions = np.floor(x_positions / line_distance) * line_distance
distances_to_nearest_line = x_positions - nearest_line_positions
# determine which needles cross a line
needle_half_length = needle_length / 2
# a needle crosses a line if distance to nearest line < (L/2)*sin(theta)
# or if distance to next line > line_distance - (L/2)*sin(theta)
crossing_left = distances_to_nearest_line < needle_half_length * np.sin(thetas)
crossing_right = distances_to_nearest_line > line_distance - needle_half_length * np.sin(thetas)
crossings = np.sum(crossing_left | crossing_right)
# calculate estimated π
if crossings > 0:
estimated_pi = (2 * needle_length * num_needles) / (crossings * line_distance)
else:
estimated_pi = float('inf')
# prepare needle data for visualization
needles = [(x_positions[i], y_positions[i], thetas[i]) for i in range(num_needles)]
return estimated_pi, crossings, needles
def plot_experiment(
needles: List[Tuple[float, float, float]],
line_distance: float = 1,
max_y: float = 10,
needle_length: float = 1,
highlight_crossings: bool = True
) -> plt.Figure:
"""
Visualize the Buffon's needle experiment.
Parameters:
-----------
needles : List[Tuple[float, float, float]]
List of (x, y, theta) for each needle
line_distance : float
Distance between parallel lines
max_y : float
Maximum y value for visualization
needle_length : float
Length of each needle
highlight_crossings : bool
Whether to highlight needles that cross lines
Returns:
--------
plt.Figure
The matplotlib figure object
"""
fig, ax = plt.subplots(figsize=(10, 8))
# draw parallel lines
num_lines = int(10 / line_distance) + 1
for i in range(num_lines):
ax.axvline(x=i*line_distance, color='black', linestyle='-', alpha=0.7)
# half-length of the needle
half_length = needle_length / 2
# draw needles
crossing_needles = []
non_crossing_needles = []
for x, y, theta in needles:
# calculate needle endpoints
dx = half_length * np.sin(theta)
dy = half_length * np.cos(theta)
x1, y1 = x - dx, y - dy
x2, y2 = x + dx, y + dy
# check if needle crosses a line
crosses = False
line_positions = [i*line_distance for i in range(num_lines)]
for line_pos in line_positions:
# if the needle endpoints are on opposite sides of the line
if (x1 - line_pos) * (x2 - line_pos) <= 0:
crosses = True
break
if crosses:
crossing_needles.append([(x1, y1), (x2, y2)])
else:
non_crossing_needles.append([(x1, y1), (x2, y2)])
# plot non-crossing needles
for needle in non_crossing_needles:
(x1, y1), (x2, y2) = needle
ax.plot([x1, x2], [y1, y2], 'b-', alpha=0.5, linewidth=1)
# plot crossing needles
for needle in crossing_needles:
(x1, y1), (x2, y2) = needle
ax.plot([x1, x2], [y1, y2], 'r-', alpha=0.7, linewidth=1.5)
# add legend
legend_elements = [
Line2D([0], [0], color='blue', lw=1.5, alpha=0.5, label='Non-crossing needles'),
Line2D([0], [0], color='red', lw=1.5, alpha=0.7, label='Crossing needles'),
Line2D([0], [0], color='black', lw=1.5, alpha=0.7, label='Lines')
]
ax.legend(handles=legend_elements, loc='upper right')
# set axis limits and labels
ax.set_xlim(-0.5, (num_lines-1)*line_distance + 0.5)
ax.set_ylim(-0.5, max_y + 0.5)
ax.set_xlabel('X position')
ax.set_ylabel('Y position')
ax.set_title("Buffon's Needle Experiment Visualization")
return fig
def run_buffon_experiment(
max_needles: int = 10000,
step: int = 1000,
needle_length: float = 1,
line_distance: float = 1,
floor_width: float = 10
) -> Tuple[range, List[float]]:
"""
Run Buffon's needle experiment with increasing numbers of needles.
Parameters:
-----------
max_needles : int
Maximum number of needles to simulate
step : int
Step size for increasing number of needles
needle_length : float
Length of each needle
line_distance : float
Distance between parallel lines
floor_width : float
Width of the entire floor for visualization
Returns:
--------
Tuple[range, List[float]]
(needle_counts, pi_estimates) where needle_counts is a range object
and pi_estimates is a list of estimated π values
"""
needle_counts = range(step, max_needles + step, step)
pi_estimates = []
errors = []
for count in tqdm(needle_counts, desc="Simulating needle drops"):
estimated_pi, _, _ = simulate_buffon_needle(count, needle_length, line_distance, floor_width)
pi_estimates.append(estimated_pi)
errors.append(abs(estimated_pi - np.pi)/np.pi * 100) # calculate percentage error
# plot results
fig, ax1 = plt.subplots(1, 1, figsize=(12, 10), sharex=True)
# plot 1: estimated π values
ax1.plot(needle_counts, pi_estimates, 'b-', alpha=0.7)
ax1.axhline(y=np.pi, color='r', linestyle='--', alpha=0.7, label=f'π = {np.pi:.6f}')
ax1.set_ylabel('Estimated π')
ax1.set_title('Estimated Value of π vs. Number of Needles')
ax1.grid(True, alpha=0.3)
ax1.legend()
plt.tight_layout()
return needle_counts, pi_estimates
# example usage
if __name__ == "__main__":
np.random.seed(42) # for reproducibility
# simulation parameters
needle_length = 0.8
line_distance = 1.0
floor_width = 10.0 # width of the entire floor
# small visualization example
num_needles_viz = 10000
estimated_pi, crossings, needles = simulate_buffon_needle(
num_needles_viz,
needle_length,
line_distance,
floor_width
)
print(f"Dropped {num_needles_viz} needles, {crossings} crossed lines")
print(f"Estimated π = {estimated_pi:.6f} (Actual π = {np.pi:.6f})")
# visualize the experiment
fig = plot_experiment(needles, line_distance, 10, needle_length)
plt.tight_layout()
plt.savefig('buffon_needle_visualization.png', dpi=300)
# run a larger experiment to see convergence
needle_counts, pi_estimates = run_buffon_experiment(
max_needles=100000,
step=1000,
needle_length=needle_length,
line_distance=line_distance
)
# print final estimate
final_estimate = pi_estimates[-1]
print(f"\nFinal estimate with {needle_counts[-1]} needles: π ≈ {final_estimate:.6f}")
print(f"Error: {abs(final_estimate - np.pi):.6f} ({abs(final_estimate - np.pi)/np.pi*100:.4f}%)")
plt.savefig('buffon_pi_convergence.png', dpi=300)
plt.show()
Results and Convergence
When we run our simulation with an increasing number of toothpicks, we can observe something cool happening: our estimate of \(\pi\) gradually converges to the true value as the sample size grows.
Here is the putput from running a simulation using 100000 toothpicks.
Here is the plot showing the numerical convergence to the value of \(\pi\).
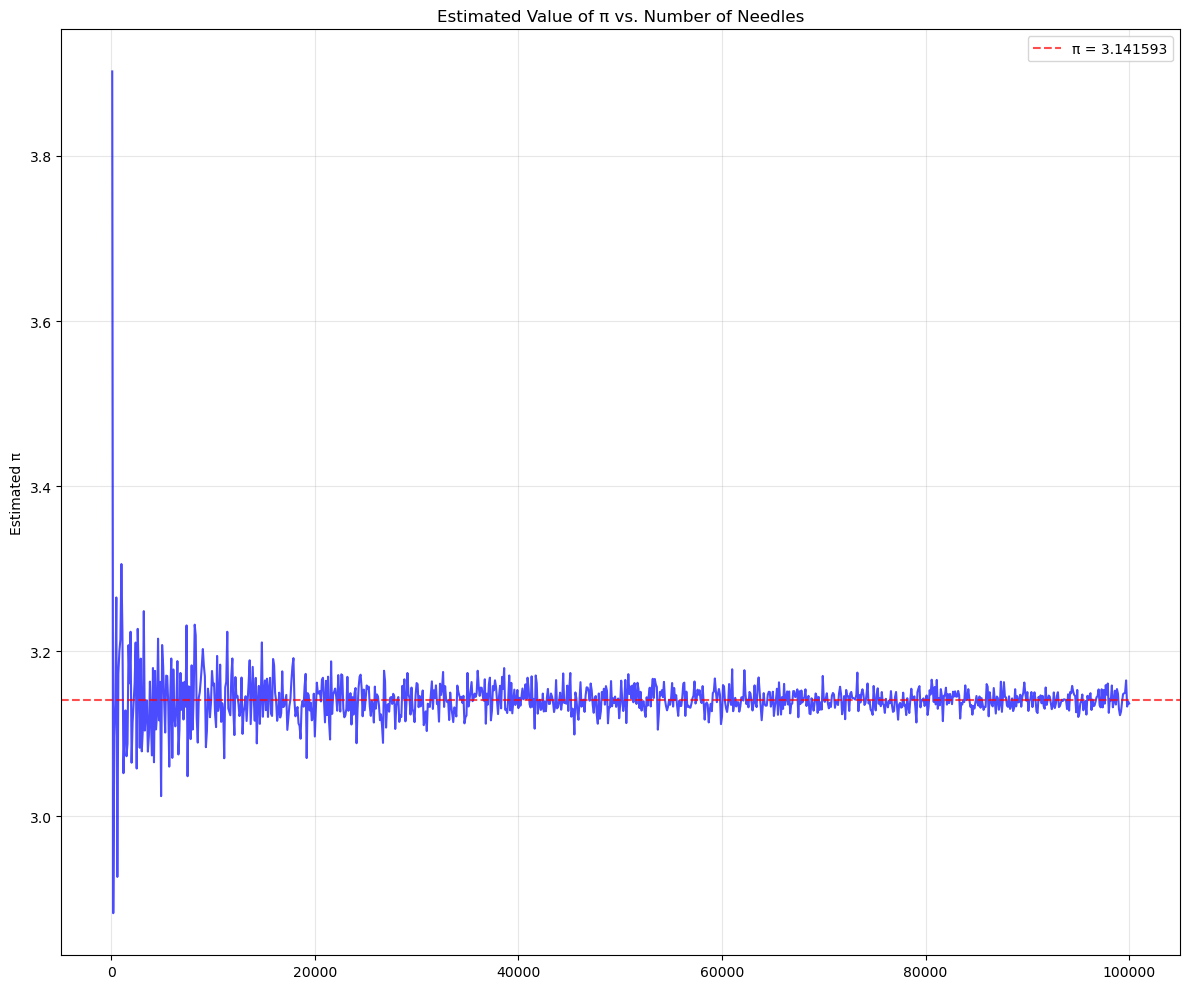
With just a few hundred toothpicks, our estimate might be off by 10% or more. But with tens of thousands of toothpicks, we typically get within 0.1% of the actual value of \(\pi\).
Just for fun here is an animation showing the convergence of the value of \(\pi\) as we drop more and more toothpicks.
Conclusion
I found this particular problem interesting owing to the overlap of probability and geometry. The fact that \(\pi\), this transcendental number that appears throughout mathematics, can be approximated by simply dropping sticks on the floor is fascinating. I hope you enjoyed this breakdown of the problem and our implementation.
The next time you spill toothpicks on your kitchen floor, don’t just sweep them up. Count how many cross the tiles, and see how close you can approximate the value of \(\pi\).
Deriving the Formula
Here we discuss how Buffon derived this equation. When Buffon solved this problem in the 18th century, he used geometric probability, a field that was relatively new at the time. His approach is very elegant hence I wanted to include it here.
Setting Up the Parameters:
- The position of a toothpick can be completely described by two independent variables:
- The distance $x$ from the center of the toothpick to the nearest floorboard edge (ranges from 0 to \(d/2\))
- The angle \(\theta\) between the toothpick and the edge (ranges from 0 to \(\pi\))
Geometric Analysis:
- For any given angle \(\theta\), the toothpick will cross between two floorboards if the distance from its centre to the nearest line is less than \(\frac{l\sin\theta}{2}\)
- To visualize this: imagine a toothpick at angle \(\theta\). The “reach” of this toothpick from its centre point is \((l/2)\sin\theta\) in the direction perpendicular to the lines.
Calculating the Probability:
For a fixed angle \(\theta\), the toothpick crosses between two floorboards when
\[x < \frac{l\sin\theta}{2}\]Since $x$ is uniformly distributed between 0 and \(d/2\), the probability of crossing at this specific angle is
\[P(\text{crossing} | \theta) = \frac{l\sin\theta}{d}\]To get the overall probability, we need to integrate this over all possible angles
\[P = \frac{2}{\pi} \int\limits_{0}^{\pi/2} \frac{l\sin\theta}{d} d\theta\]
The 2/\(\pi\) factor comes from normalizing over the range of angles. Solving this integral
\[\begin{aligned} P &= \frac{2}{\pi} \frac{l}{d} \left[-\cos(\theta)\right]_{0}^{\pi/2} \\ P &= \frac{2}{\pi} \frac{l}{d} \left[0 - (-1)\right] \\ P &= \frac{2}{\pi} \frac{l}{d} 1 \\ P &= \frac{2l}{\pi d} \end{aligned}\]What makes this result so elegant is that \(\pi\) appears naturally in the calculation because:
- The range of possible angles (0 to \(\pi\)) introduces a factor of \(\pi\) in the denominator
- The integration of \(\sin\theta\) over this range brings in trigonometric properties related to circles
- The averaging over all possible orientations essentially captures the ratio of a circle’s circumference to its diameter - which is precisely the definition of \(\pi\)